感知规划决策
自动驾驶
简单的将自动驾驶分成感知规划控制
感知:
建图
fast-lio
Cartographer
定位
amcl
规划:
Navigation–导航算法(局部视野导航)–DWA、TAB_majingming123的博客-CSDN博客
这方面的优化主要有两个方向一个是基于图优化
导航
基本上就是nav1或者nav2然后在这个框架下调用算法
全局规划:
Dijkstra算法、A算法_dijkstra算法和a算法_Jason.Li_0012的博客-CSDN博客、
自动驾驶 | 路径规划算法Dijkstra与A*_3D视觉工坊的博客-CSDN博客
a*还有迪杰斯特拉
局部规划:
teb和dwa
决策
控制:
决策系统负责
定位
定位这块,市面上的主要是基于gps,但是由于有一些道路信号不好,比如峡谷,荒郊野岭。主流的有三种定位方式:激光雷达,相机,激光雷达加相机
激光雷达的缺点是成本高,激光雷达很贵,我们智慧物流小车上面的一个二维激光雷达就是400。优点就是处理方便
相机的缺点是需要进行深度学习,ai训练模型,对于复杂路况进行判断,同时相对来说不太可靠。优点就是价格便宜。
定位算法
基于激光雷达
amcl(多层自适应蒙特卡洛算法)
MCL
基于激光雷达和相机
基于相机的
决策
基础算法
路径规划
对于实际生活场景来说djikastra和A*都有些过于简单
工具
雷达
https://getiot.tech/zh/lidar/lidar-software-tools这个网站超级好,必看
激光雷达究竟是个啥?为什么自动驾驶都得靠它?激光雷达揭秘科普!_哔哩哔哩_bilibili
雷达有很多种,激光雷达,毫米波雷达
激光雷达也分为很多种,
有2d的也有3d
有单线激光雷达也有多线激光雷达
2d和3d的区别
2D导航激光雷达,基本只能实时导航,二维成像缺乏高度信息,无法成像。
3D激光雷达,可以三维动态实时成像,能实时成像,并且还能还原物体形状大小,还原空间的三维信息。所以自动驾驶都用,三维动态激光雷达。
单线和多线激光雷达
单线激光雷达一个发射器一个接收器。数据量处理少,技术成熟。多为2d,优点是反应快,角频率和灵敏度更高,测距和精度都更加的准确,主要应用与室内扫地机器人
多线激光雷达,4线 8线64线,缺点是处理速度慢,实时3d建模,主要应用于自动驾驶。价格更贵

雷达工作原理
这里以毫米波雷达进行举例
首先要清楚毫米波雷达和激光雷达都是使用光的,但是毫米波雷达的光的波长更短,获取信息更丰富,但是相对来说距离更近(特斯拉也是使用毫米波雷达的)
毫米波(Millimeter-Wave)雷达,通过发射电磁波信号,接收目标反射信号来获得车身周围其他障碍物的相对速度、相对距离、角度、运动方向等。
单线激光雷达原理分成两种
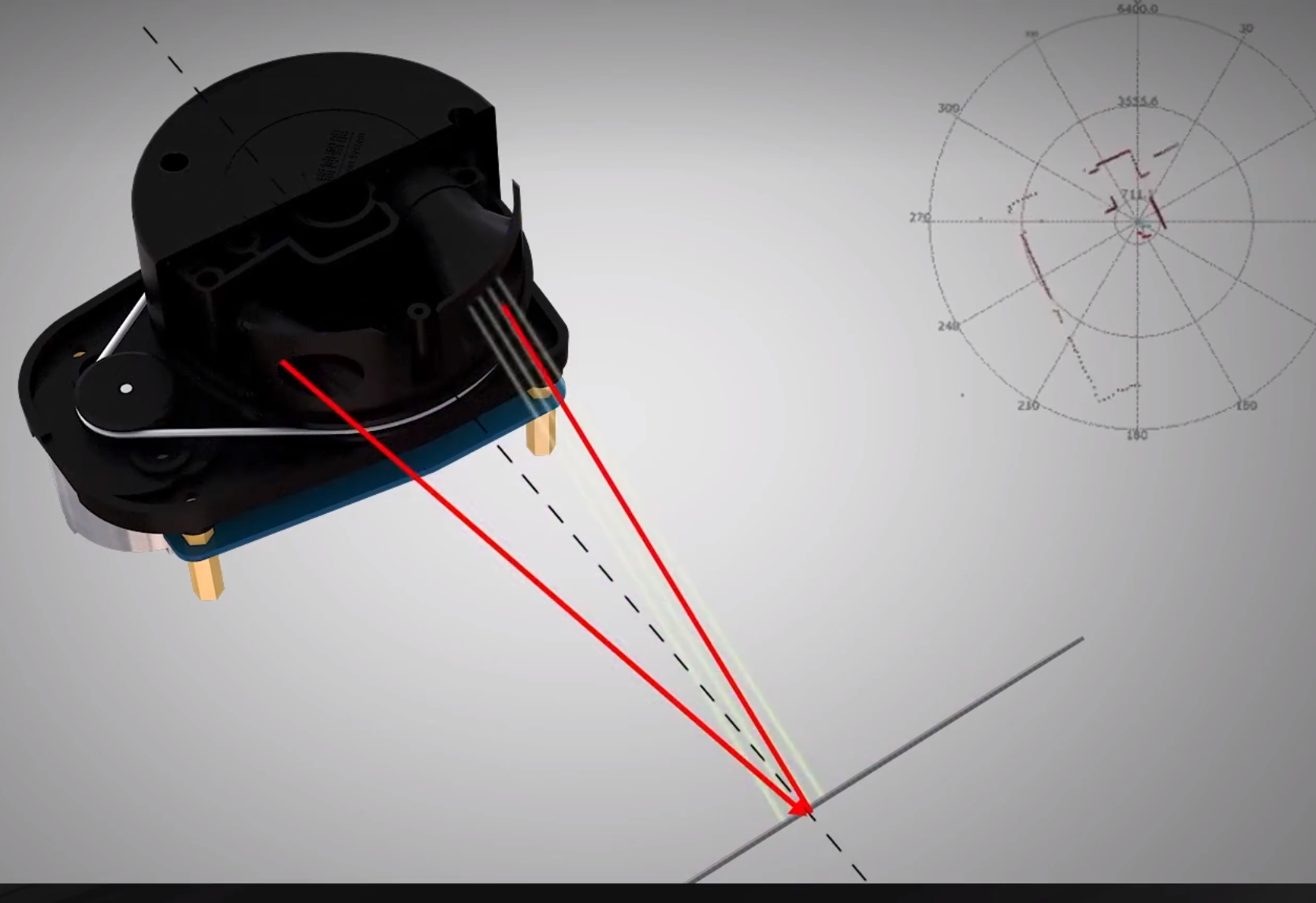
分为三角法,tof法,一般激光雷达是由激光发射器,接收器,信号处理单元,电机组成。
接收器负责接受从障碍物反射回来的光线
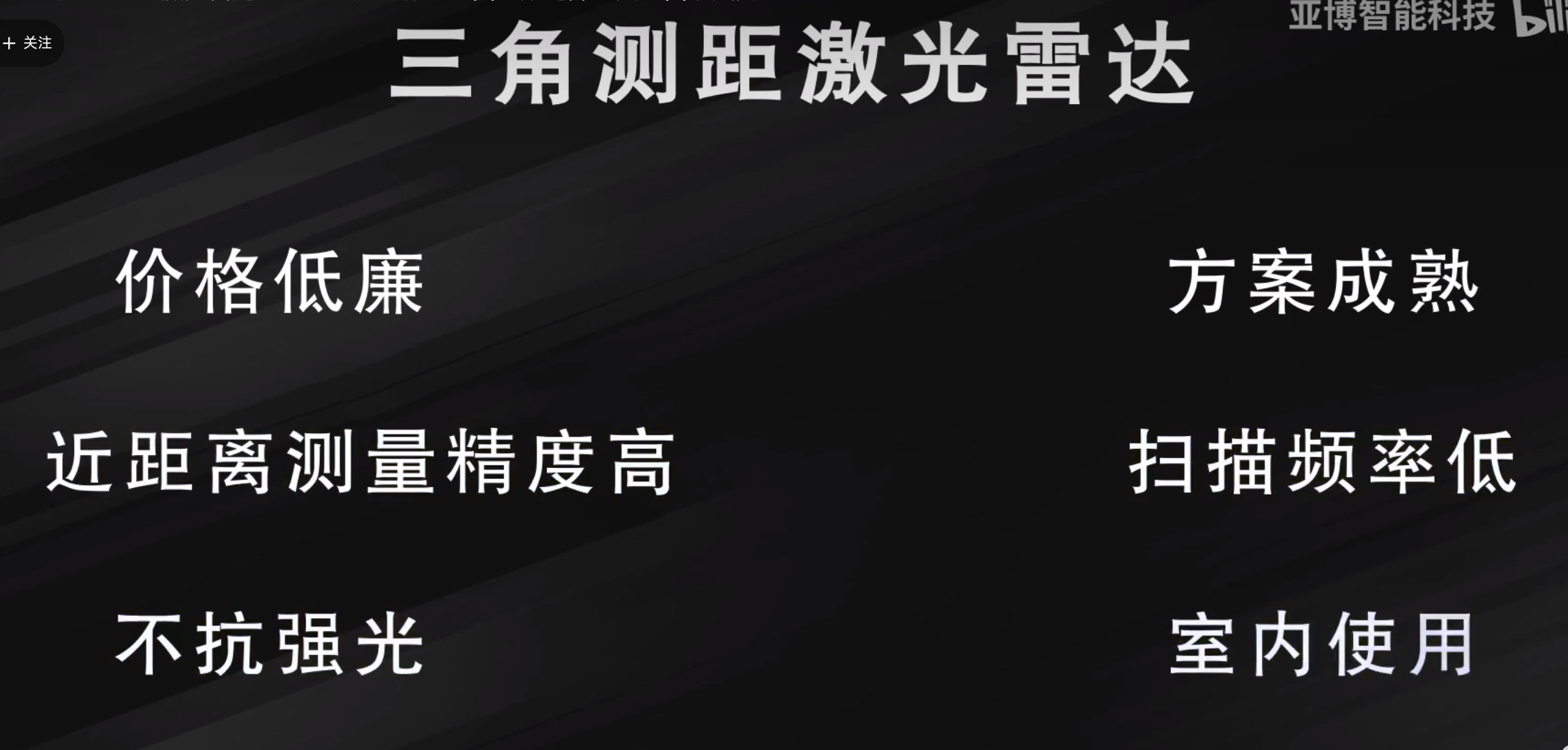
- 从测量距离来看,三三角测距的距离短,一般是20m左右,而tof的距离能到30m以上
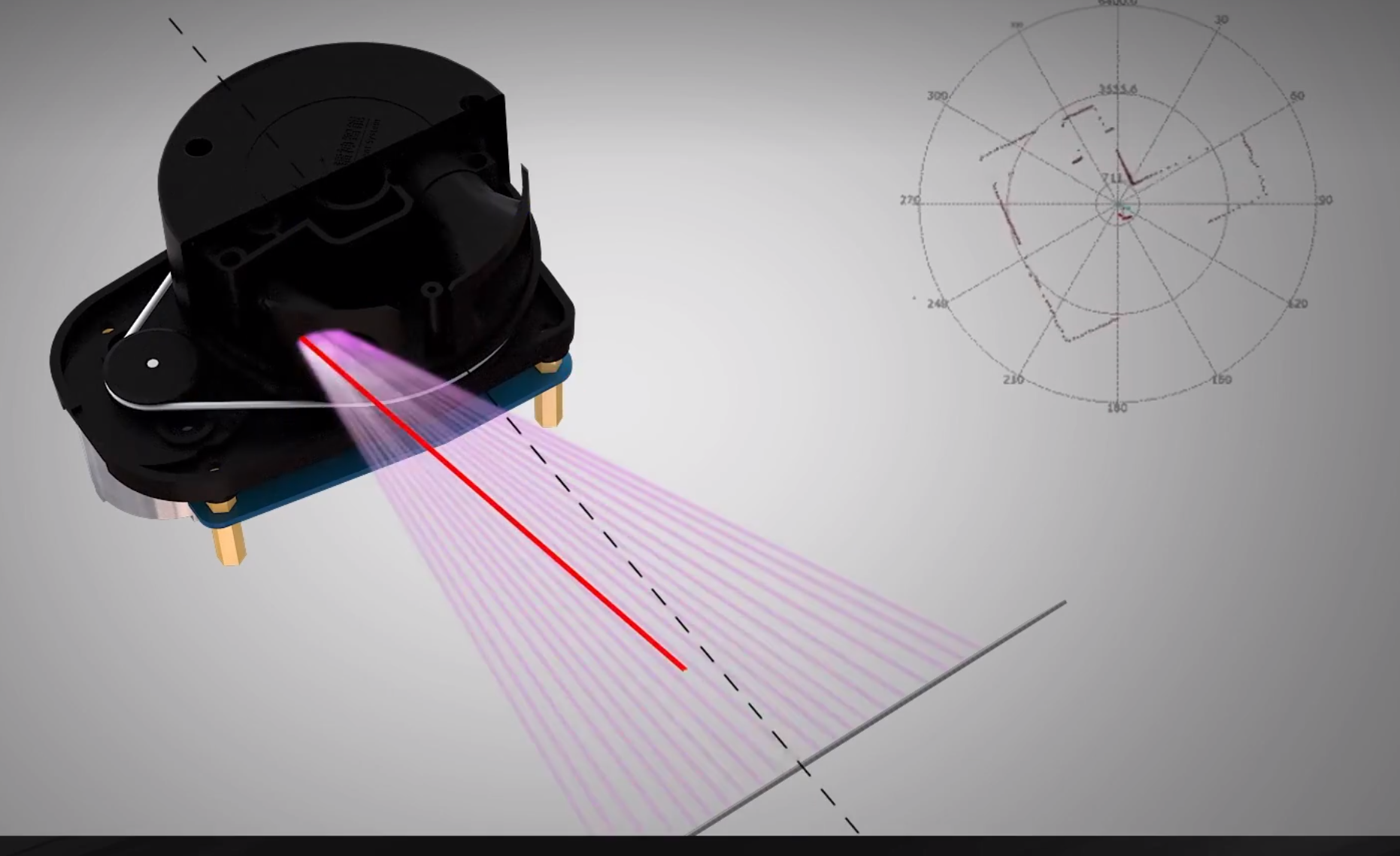
首先要明确一点的是激光雷达是会旋转的。获取环境的点云信息也取电机的旋转速度。
- 在生产成本来看tof更贵
- 精度:三角测距对于近距离的精度很高,如下图所示

而对于tof雷达来说,测距精度不会根据距离的增大有太大的变化,一般可以稳定在3cm左右,我觉得我们选择tof测距的主要原因也是这个。
基本原理:激光器发射激光到被测物体,经物体反射后,通过透镜汇聚到CCD传感器上,当被测物体移动时,传感器上的光斑也会移动,通过几何三角关系可得出激光器到物体的距离,这也是被称为三角测距雷达的来源
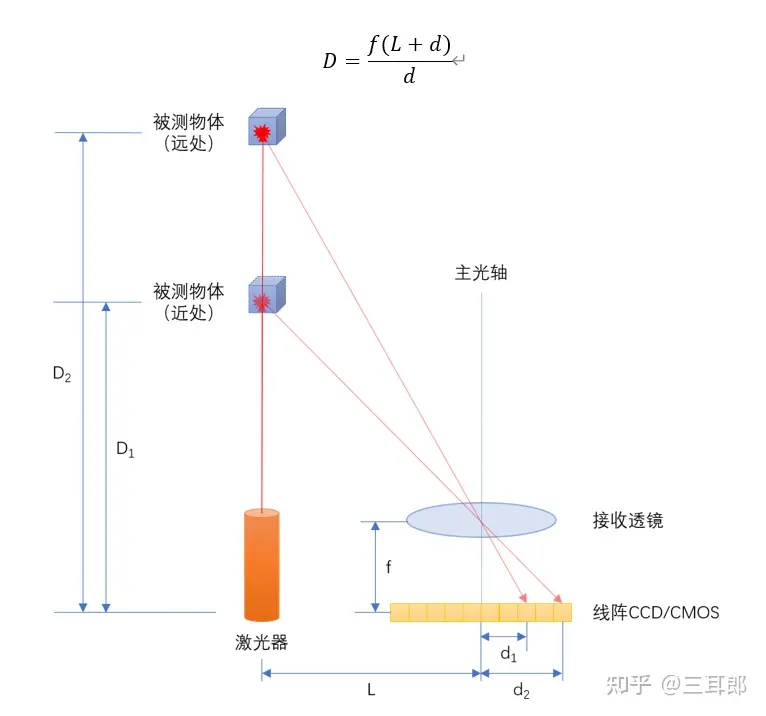
三角测距雷达原理图
TOF(时间飞行法)激光雷达
基本原理:TOF雷达原理相对三角雷达较简单,激光器发射激光信号到被测物体,经反射后到达光电器件,进行信号转换给到回波信号处理电路,最终获得电脉冲信号传给计时器,计算出光飞行的时间,因为光速一定,通过测量光从出发到接收的总时间除以2乘以光速(d=t*v/2),即计算出雷达到被测物体的距离
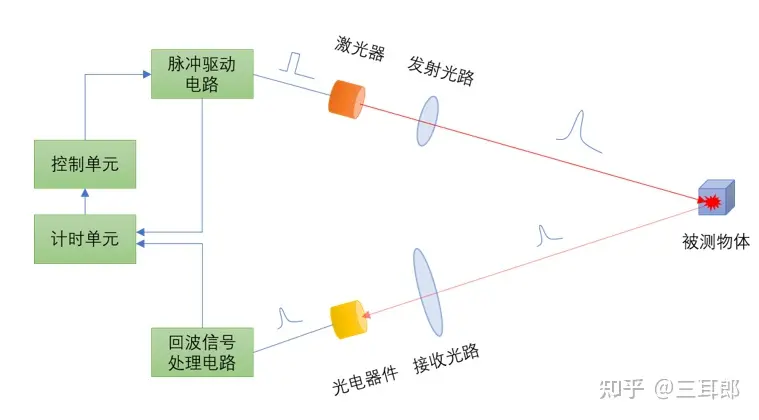
TOF雷达原理图
市场
tesla
在21年以前,它是有装毫米波雷达的。后来转为纯视觉方案

ElonMusk 详细解释过他对雷达和摄像头的看法:
在雷达波长下,现实世界看起来像一个奇怪的幽灵世界。除了金属,几乎所有东西都是半透明的。
当雷达和视觉感知不一致时,你采信哪一个?视觉具有更高的精度,因此投入两倍的精力改善视觉比押注两种传感器的融合更明智。
传感器的本质是比特流。摄像头比特/秒的信息量要比雷达和激光雷达高几个数量级。雷达必须有意义地增加比特流的信号/噪声,以使其值得集成。
随着视觉处理能力的提高,摄像头的性能将会远远甩开当下的雷达。
理想L9
